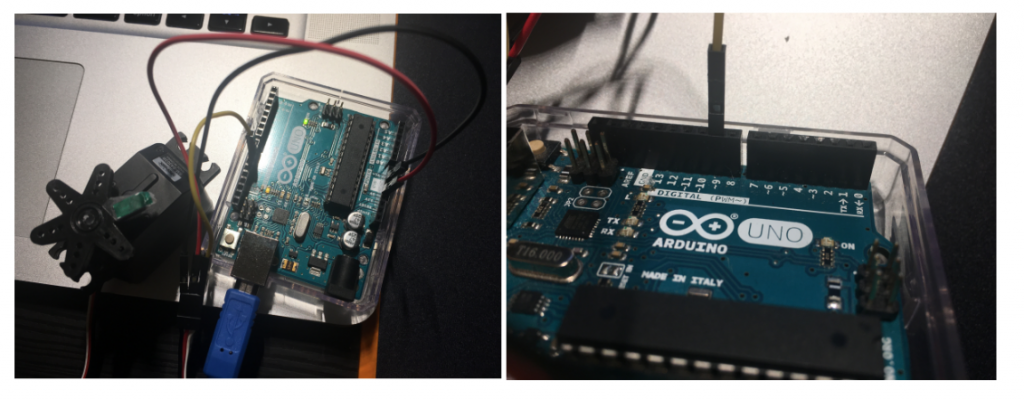
Para controlar un servo motor de giro continuo, debemos conectar el motor a la placa
del microcontrolador en función de las indicaciones del manual del motor.
Las tres conexiones que debemos realizar son las siguientes:
VCC, GND y Señal.
Una vez realizadas las conexiones, debemos incluir en el programa del Arduino, la librería
servo.h
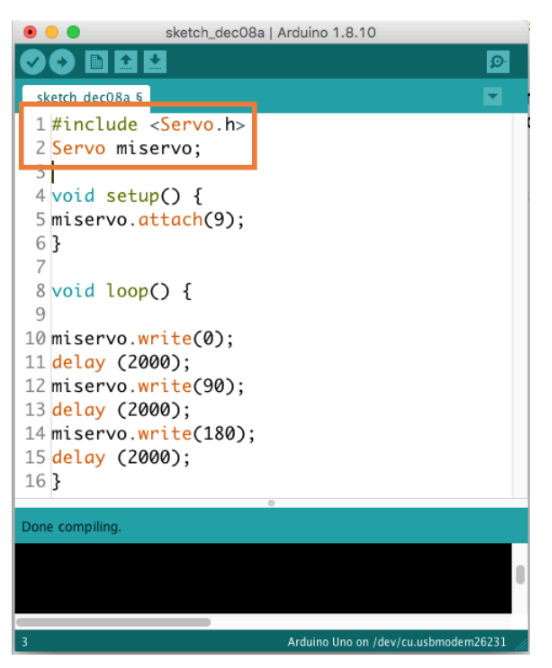
Esta librería nos permitirá controlar el servo de una manera muy sencilla.
La librería servo.h ya viene incluida en el ide de Arduino, por lo que no será necesario
descargar otra librería para efectuar el control del motor.
Luego debemos declarar el objeto que estará asociado al control de este motor.
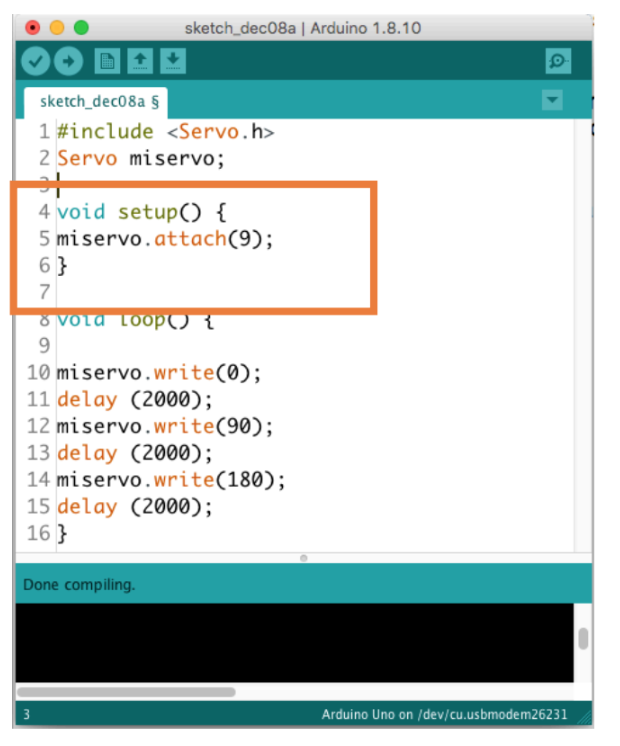
Esto lo hacemos mediante la siguiente instrucción:
miservo.attach(9)
donde el argumento de la función, corresponde al pin en donde estará conectado el cable
del motor que corresponde a la señal de control.
Para nuestro ejemplo, hemos conectado el cable de control al pin 9 del Arduino UNO.
Por ultimo debemos escribir la instrucción con la cual controlaremos la velocidad del
motor.
Se trata de la instrucción miservo.write()
Como estamos trabajando con un servomotor de giro continuo, El argumento de esta
función corresponderá a la velocidad con la cual girara el motor.
Si utilizamos (0) como argumento, el motor girara a máxima velocidad hacia un sentido.
Si utilizamos (90), el motor de detendrá.
Si utilizamos (180), el motor girara en sentido contrario.
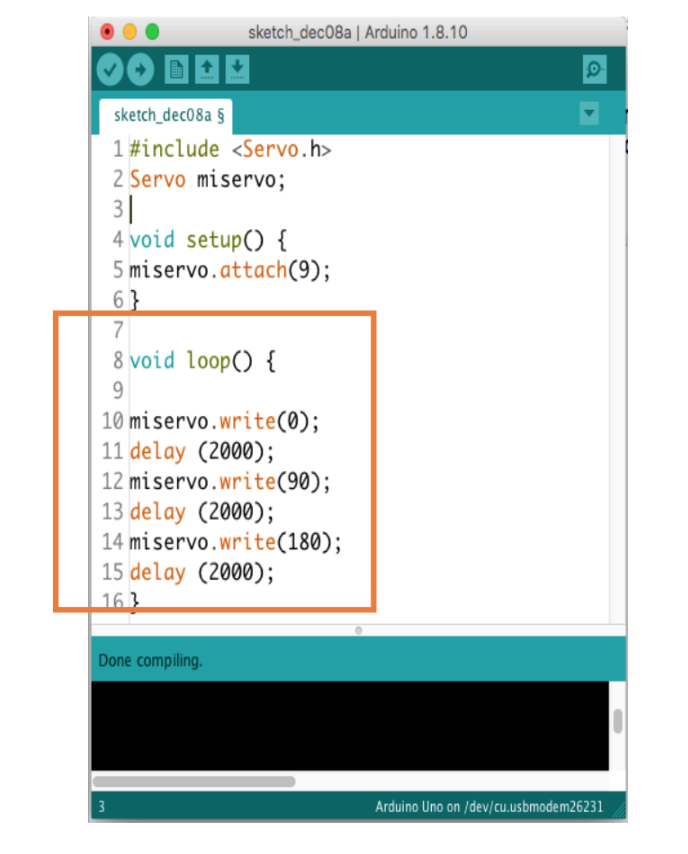
Como estas instrucciones están escritas en el void loop (), estas se ejecutaran en forma
continua.
El motor girara en un sentido a máxima velocidad por 2 segundos,
luego se detendrá por 2 segundos,
el motor girara a máxima velocidad y en sentido opuesto por 2 segundos,
luego se detendrá por 2 segundos,
y se repetirá continuamente mientras el microcontrolador este energizado.
Ustedes pueden experimentar utilizando otros valores entre los señalados y comprueben
que ocurre con la velocidad del motor.