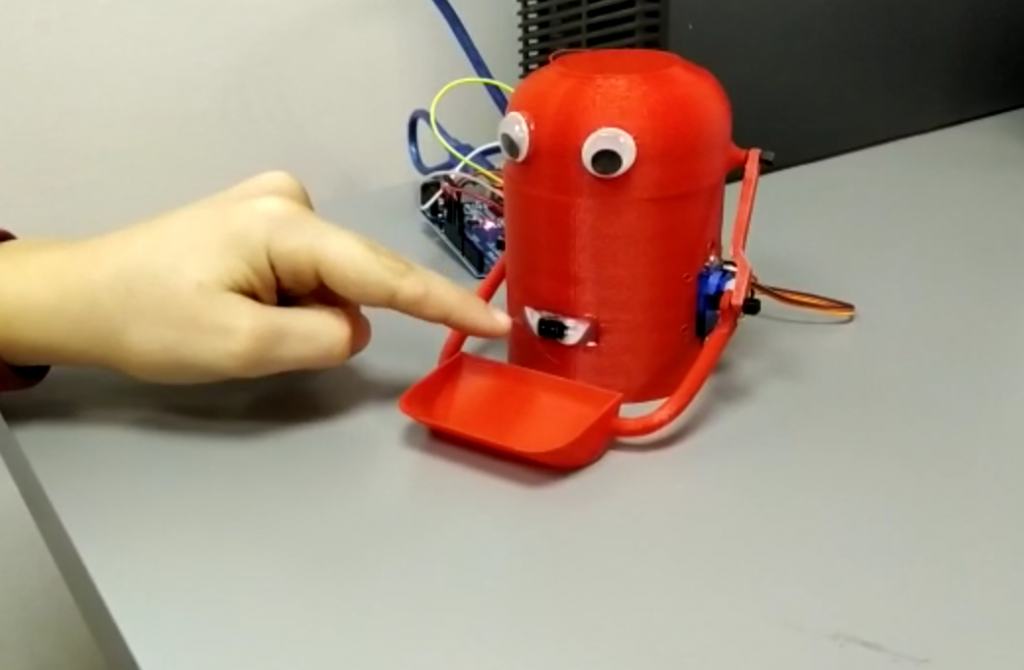
Robot hambriento2 con sensor IR
Vamos a construir un robot que se accione al depositar un objeto en su bandeja. ELEMENTOS: Componentes del robot impresos Servo Sensor de IR Placa Arduino Cables Partimos del robot impreso y montado de la versión 1 con MRT. Incluye el sensor de IR en la carcasa del robot y fija el servo. Puedes seguir …