8. Control de servo de 0 a 180º. Tutorial Arduino
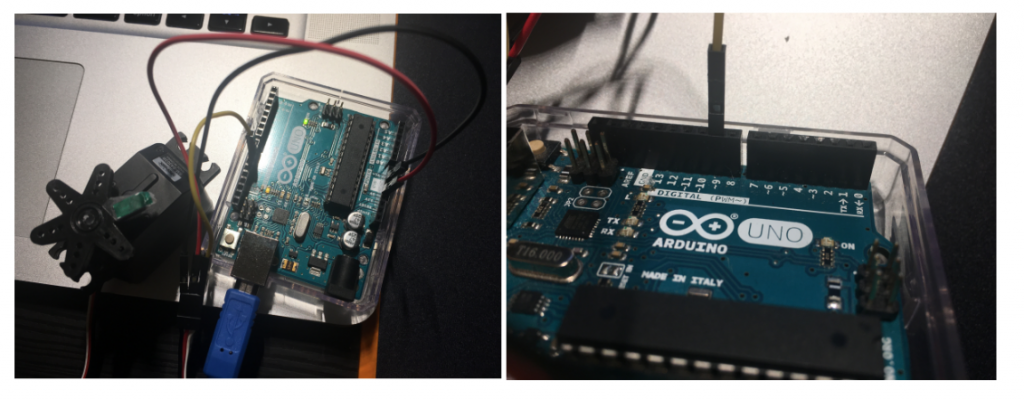
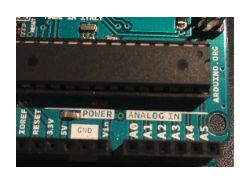
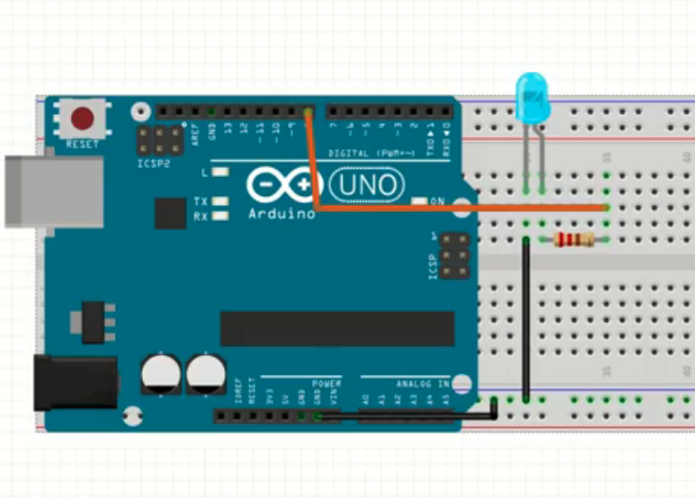
Para controlar un servo motor de giro continuo, debemos conectar el motor a la placa del microcontrolador en función de las indicaciones del manual del motor. Servomotor: EMAX ES08MA II Las tres conexiones que debemos realizar son las siguientes: VCC (Cable Anaranjado) GND (Cable Negro) Señal (Cable Amarillo) Para el control del motor, conectaremos el …
8. Control de servo de 0 a 180º. Tutorial Arduino Leer más »